@@ -234,8 +234,16 @@ In order to investigate the properties of the gyro sensor, it was mounted on the
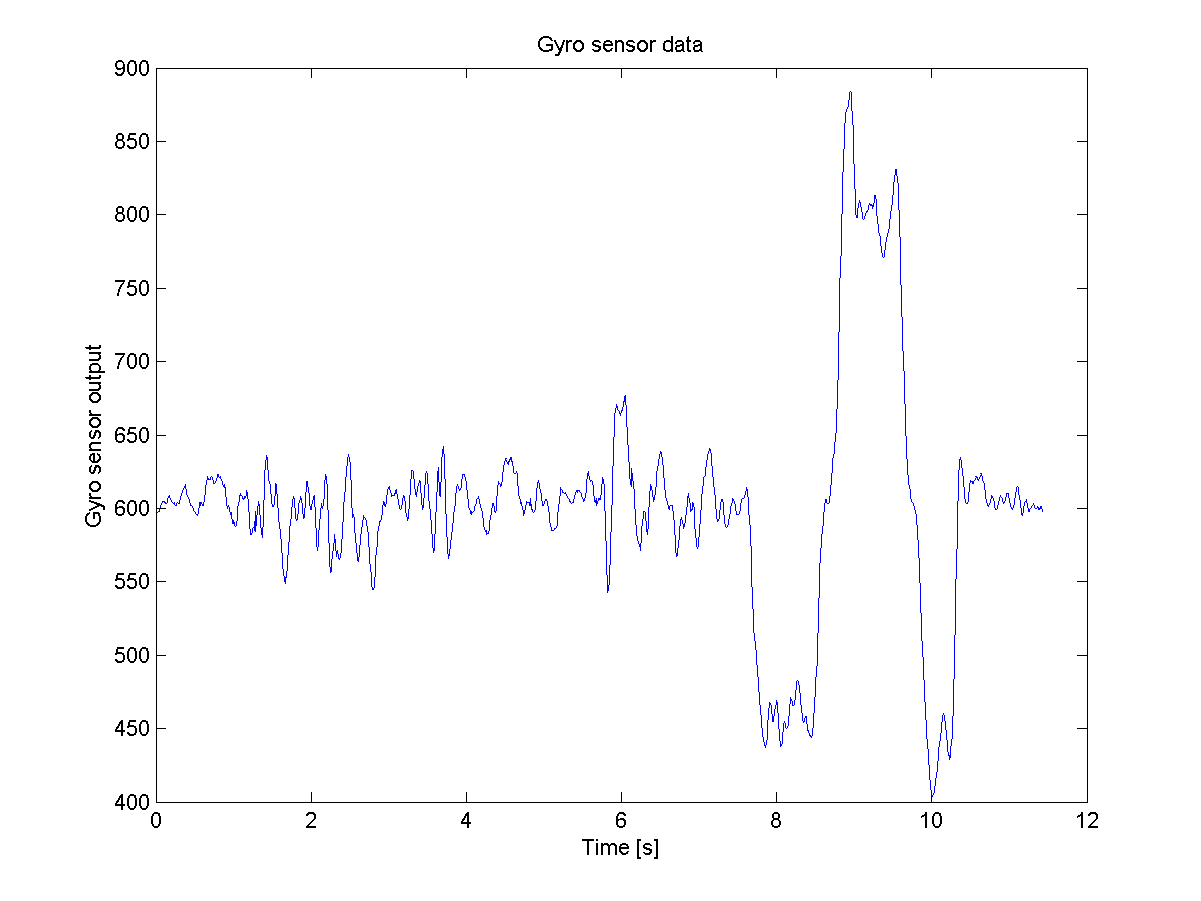
The data shows, that the offset for this sensor is around 600. Furthermore, it can be seen from the data, that the supplied gyro sensor only senses changes to angular velocity in one axis. This can be seen by the three spikes starting just before T = 8. These spikes corresponds the three movements, for a single axis.
The small fluctuations in th graph is mainly due to an unsteady hand, when turning the robot. In order to test if the gyro drifts, a test was performed, where the gyro sensor was lying completely still. The results from this test is shown in the figure below.

The high variations in the beginning and the end of the graph is due to the button presses to start and stop the test.
The output from the gyro sensor is an integer, which causes the output to take discrete values like 601, 602 and 603.
The small changes, which is seen in the graph might be due to drift, or inaccuracy in the measurements.
From the test we can conclude that the gyro sensor is drifting very little over a period of half a minute, at least when the environment is not changing.
Other similar tests could be performed to test how the environment(temperature, humidity etc.) affects the drift.
... drift ..
Forklar hvordan vi har isoleret de forskellige gains og hvad de gjorde.
...
...
@@ -251,6 +259,7 @@ Hvad vi har prøvet:
- Afhjælpes med GyroSPeed Gain -> Robotten reagere hurtigt, men den ved ikke hvad vinklen er
- Sensoren har siddet to steder, først i toppen og dernæst længere nede -> Mindre rystelser, men også mindre udsving i vinklen.
