@@ -29,7 +29,18 @@ For this exercise we used a LEGO model build according to the description in [2]
[INSERT PICTURE OF MODEL]
The standard software architecture is used along with the “LightPIDController” class.
By repeatedly tuning the parameters through the PC GUI we ended up with the best possible setting of:
| Parameter | Value |
| ------------- |:------:|
| Kp | 1 |
| Ki | 0.001 |
| Kd | 0 |
| Tp | 90 |
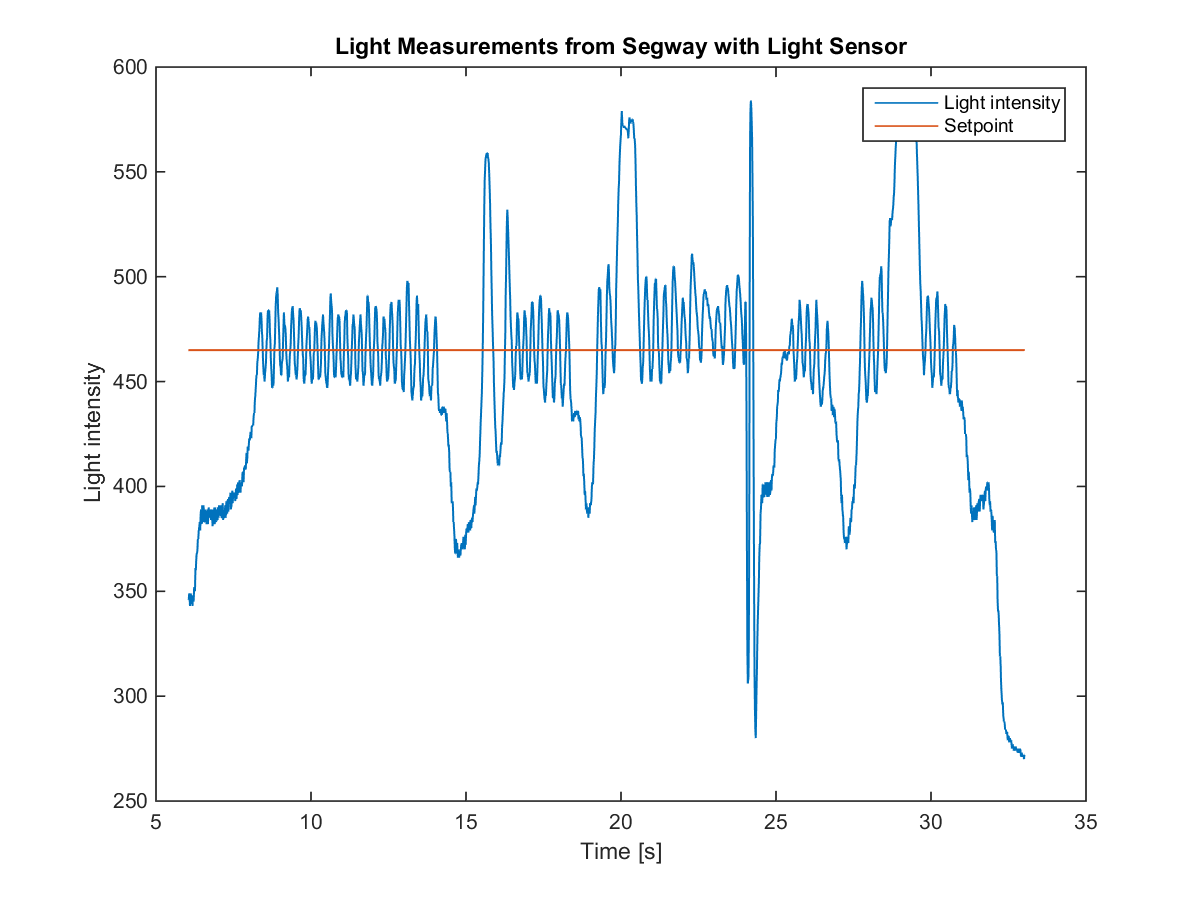
A video of the end result is seen in [XXX]. This video shows that the Lego robot is able to perform self-balancing in short intervals of about 1-2 seconds. In order investigate this behavior the data logger is used to collect the light sensor readings during the execution of the program. The end result of this is seen in the following image.
### Exercise 2, Self-balancing robots with color sensor
