@@ -59,7 +59,11 @@ This image shows the PID controllers offset as the red line and the output of th
### Exercise 3, Self-balancing robots with gyro sensor
In order to investigate the properties of the gyro sensor, it was mounted on the shoulder of the robot. The robot was then rotated about 90 degrees in one direction (1. movement), then 180 degrees in the opposite direction (2. movement), then then rotated back 90 degrees to the starting point (3. movement). This procedure was carried out for all three axes, one at a time, as shown in video [4].
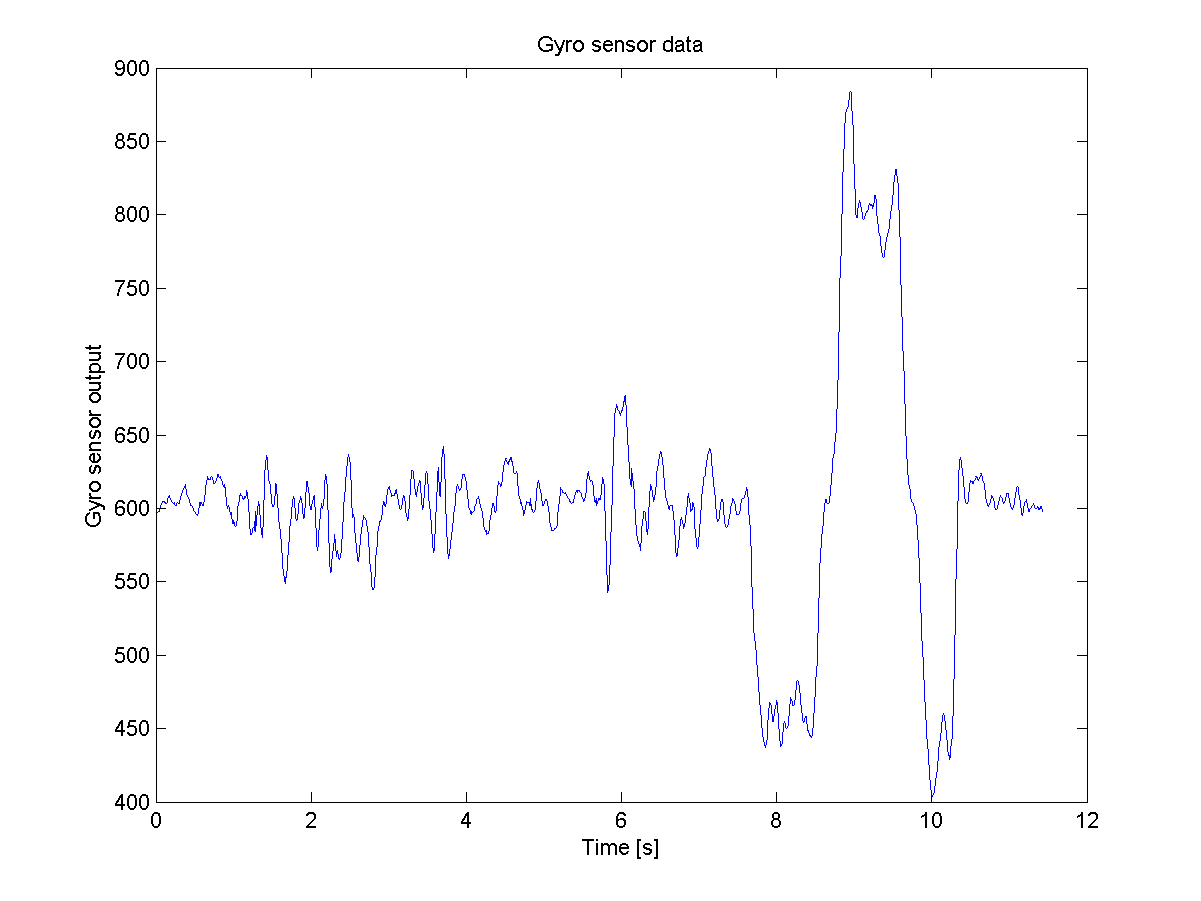
The data shows, that the offset for this sensor is around 600. Furthermore, it can be seen from the data, that the supplied gyro sensor only senses changes in one axis. This can be seen by the three spikes starting just before T = 8. These spikes corresponds the three movements, for a single axis.
## Conclusion
...
...
@@ -68,6 +72,12 @@ This image shows the PID controllers offset as the red line and the output of th
