@@ -191,10 +191,15 @@ With the defined parameters the robot is again tested on the aforementioned surf
***Wooden table**: The robot could balance for 1-3 seconds
***White surface**: The robot could balance for ~25 seconds. Ended by falling of the table.
Although it seems, from these results, that the color sensor is superior compared to the light sensor analyzed in exercise 1. However the robot configurations in these two exercises are incomparable due to the general robot construction and the difference in center of gravity.
Although it seems, from these results, that the color sensor is superior compared to the light sensor analyzed in exercise 1. However the robot configurations in these two exercises are incomparable due to the general robot contruction and the difference in center of gravity.
To perform a proper comparison between the two sensors, in a self-balancing context, the color sensor on the NXT Segway with Rider [3] is replaced by the light sensor and the same procedure from this exercise is carried out.
Despite our expectations the light sensor performed worse than the color sensor under the same conditions. The reason for this could be a difference in power level between the tests otherwise the reason is unknown.
The output of the light sensor is again inspected by using the data logger.
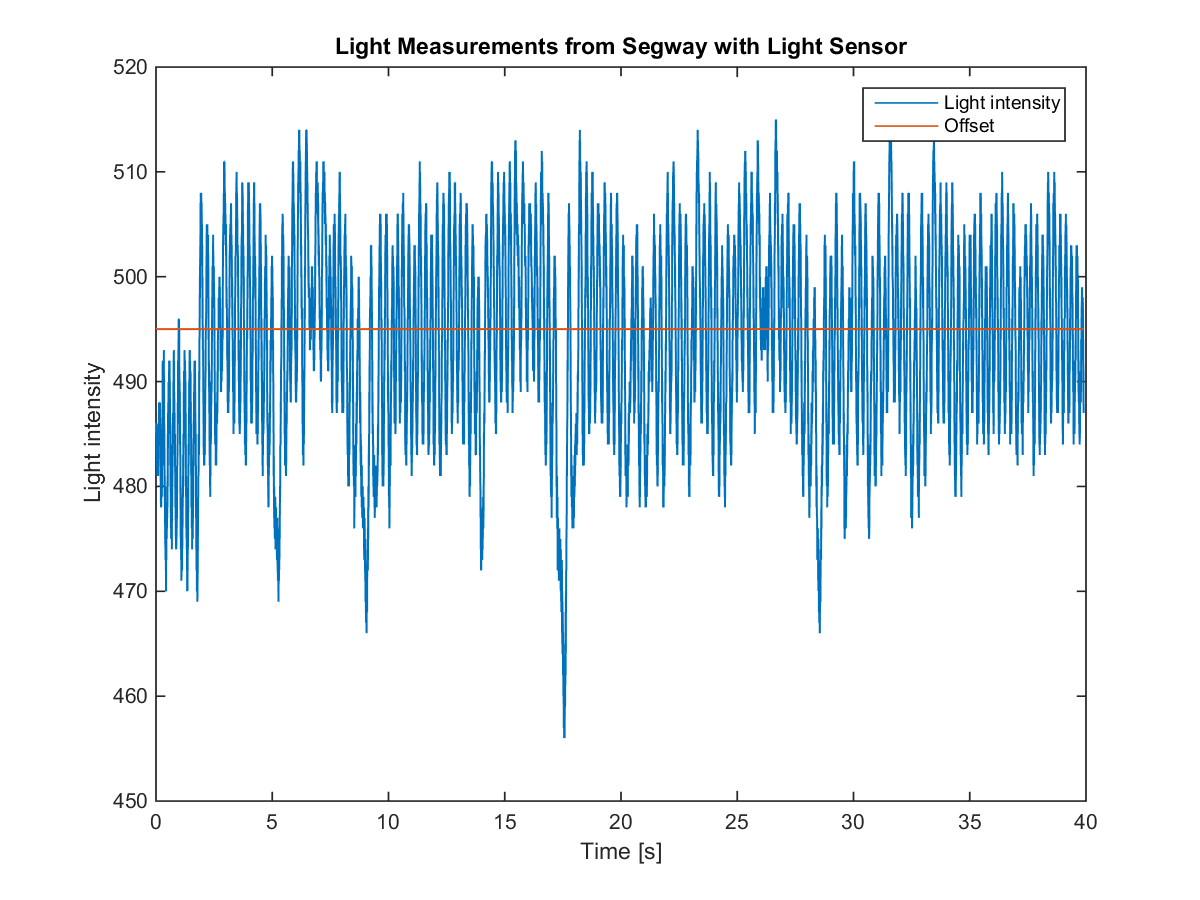
Even though the output of the two sensors are similarly shaped the robot has a higher tendency to fall when using the light sensor. So despite our expections the light sensor performed worse than the color sensor under the same conditions as seen in the video in the references section. The cause for this is at time of writing unknown but the battery powerof the robot might affect the end result.
