@@ -305,15 +305,12 @@ To test the robot and the different gains effect on the robot, as described in t
***KPos**: The motor position gain makes the wheel turn back to its original position. Increasing the gain increases the speed with which the motor turns back to the set-point. If increased to much, the motors starts oscillating.
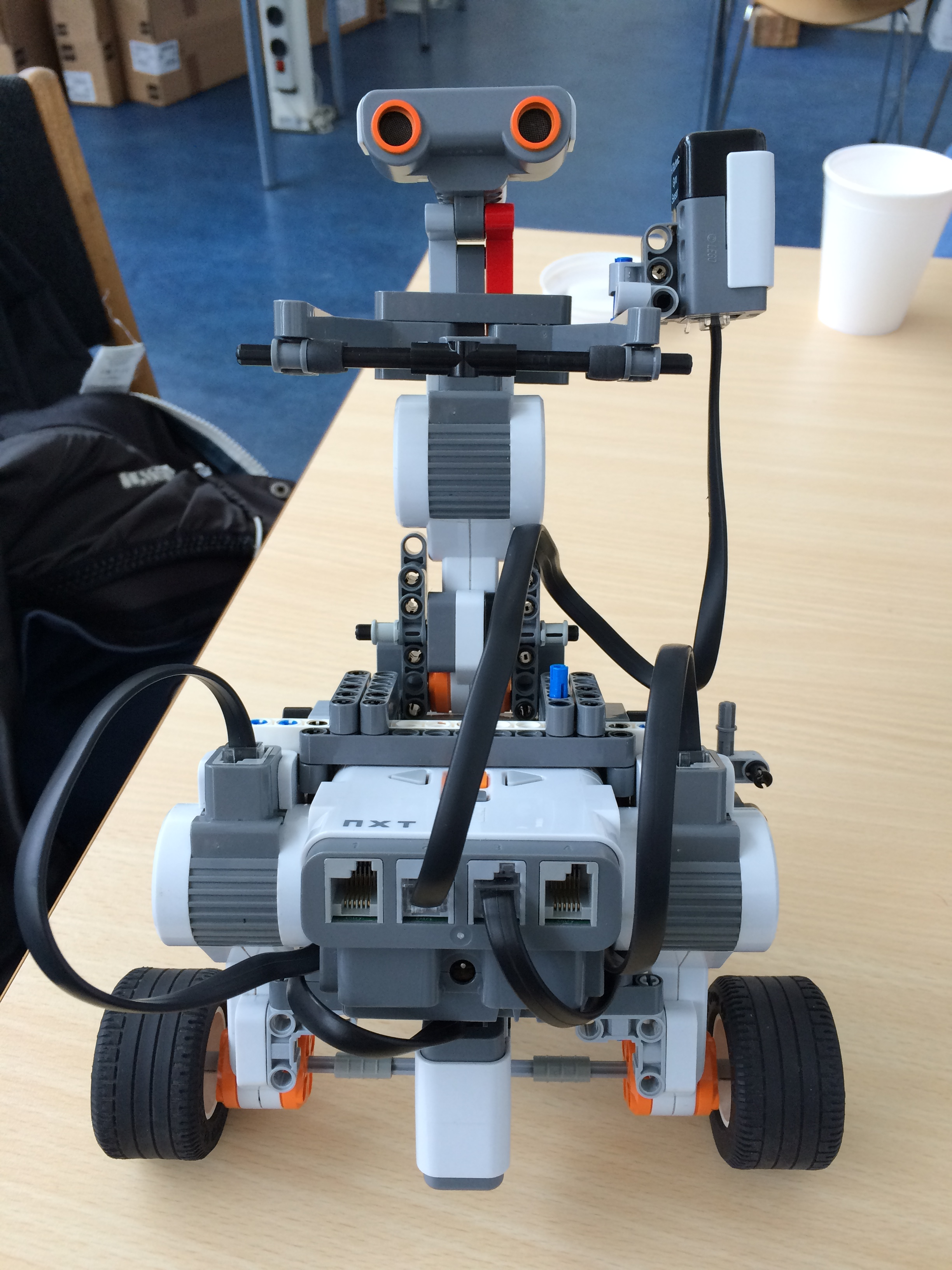
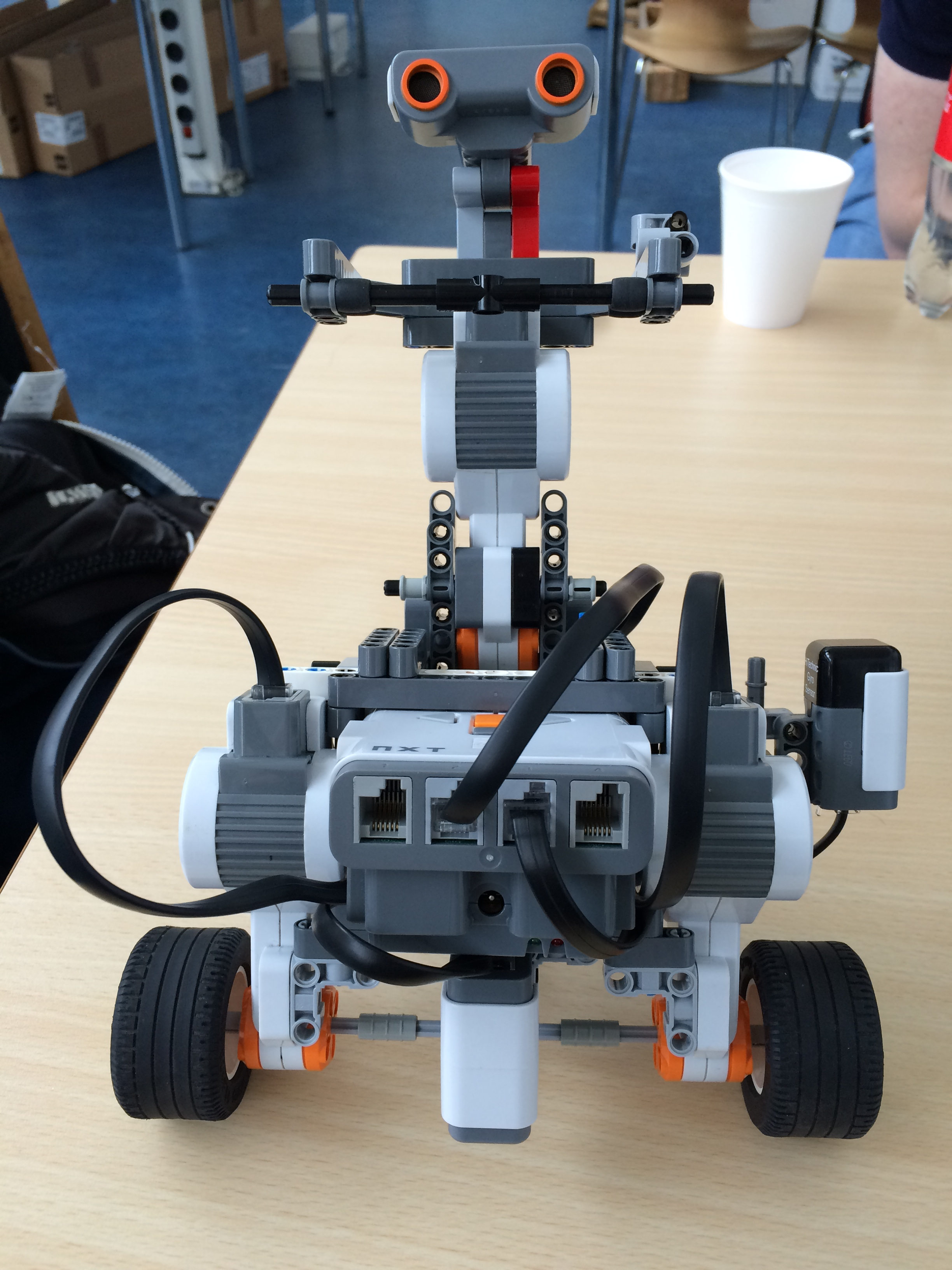
In the first test of the robot, the gyro sensor was placed on the shoulder of the robot. This gave rise to a lot of fluctuations in the gyro sensor data, due to the fact that robots upper part is very loosely connected to the lower part and therefore shakes a lot.
In the first test of the robot, the gyro sensor was placed on the shoulder of the robot(see the pictures below). This gave rise to a lot of fluctuations in the gyro sensor data, due to the fact that robots upper part is very loosely connected to the lower part and therefore shakes a lot.
In the second part, the gyro sensor was attached to the lower part of the robot. This removed a lot of the high fluctuations due to the tremors.
Hvad vi har prøvet:
- Gyroangle -> Robotten reagere for langsomt
- Afhjælpes med GyroSPeed Gain -> Robotten reagere hurtigt, men den ved ikke hvad vinklen er
- Sensoren har siddet to steder, først i toppen og dernæst længere nede -> Mindre rystelser, men også mindre udsving i vinklen.