@@ -113,7 +113,7 @@ By repeatedly tuning the parameters through the PC GUI we ended up with the best
...
@@ -113,7 +113,7 @@ By repeatedly tuning the parameters through the PC GUI we ended up with the best
With this configuration the robot was able to self-balance in short intervals of approximately 1-2 seconds as seen in the video in the references section.
With this configuration the robot was able to self-balance in short intervals of approximately 1-2 seconds as seen in the video in the references section.
In order to investigate this behavior the data logger is used to collect the light sensor readings during the execution of the program. The end result of this is seen in the following image.
In order to investigate this behavior the data logger is used to collect the light sensor readings during the execution of the program. The end result of this is seen in the following image.
![Output of the light sensor when performing self-balancing]()
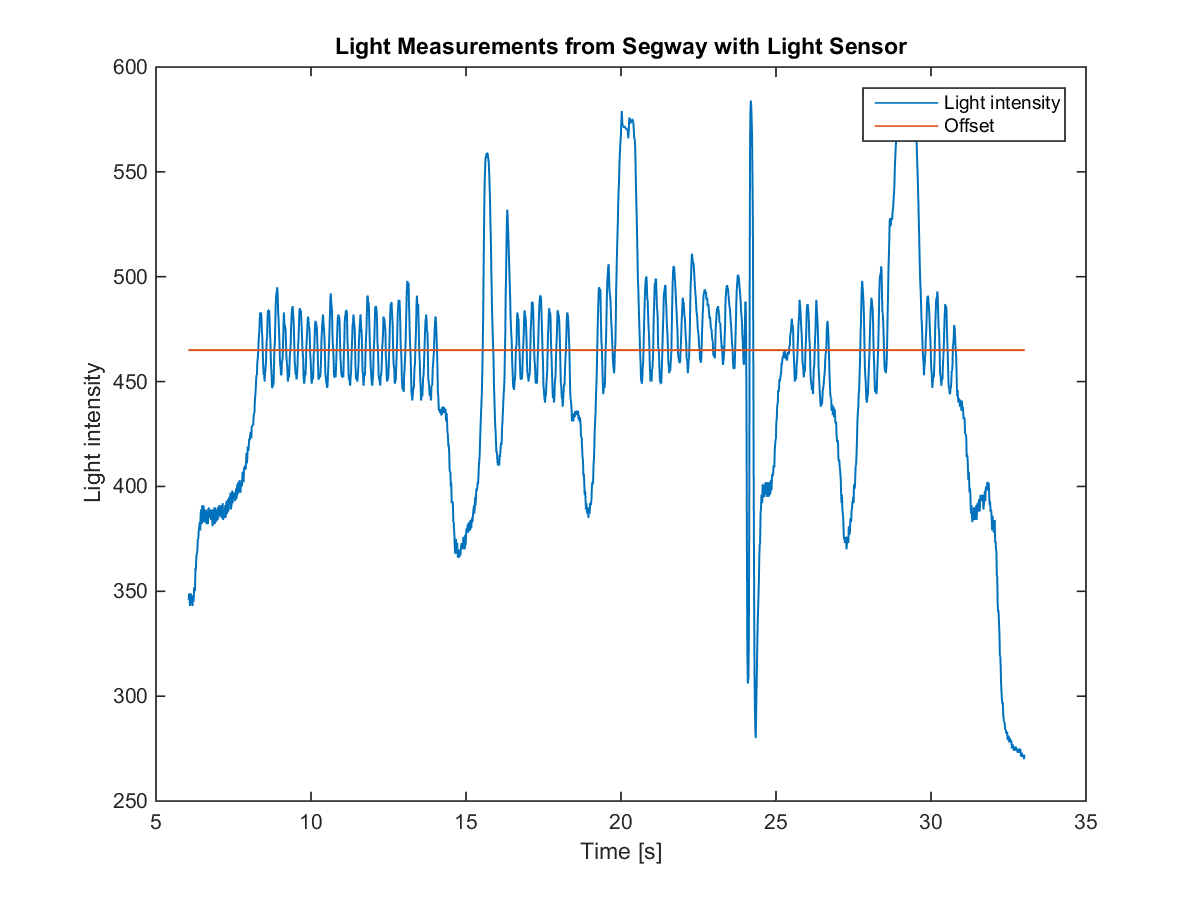
This plot shows the PID controllers offset as the red line and the output of the light sensor as the blue graph.
This plot shows the PID controllers offset as the red line and the output of the light sensor as the blue graph.
When the LEGO robot is tilting forward the light sensor will get closer to the surface which yields less light coming in and therefore the output value of the sensor will decrease. Otherwise when the LEGO robot is tilting backwards more light is coming in and the output value will increase. In order for the LEGO robot to keep balance it must constantly try to keep an upright position by applying motor force in the tilting direction (forward or backward). Due to the LEGO robots high center of gravity it is difficult to maintain an upright position resulting in the toggling back and forth between the offset until it is no longer able to adjust for the tilting.
When the LEGO robot is tilting forward the light sensor will get closer to the surface which yields less light coming in and therefore the output value of the sensor will decrease. Otherwise when the LEGO robot is tilting backwards more light is coming in and the output value will increase. In order for the LEGO robot to keep balance it must constantly try to keep an upright position by applying motor force in the tilting direction (forward or backward). Due to the LEGO robots high center of gravity it is difficult to maintain an upright position resulting in the toggling back and forth between the offset until it is no longer able to adjust for the tilting.
