Changes
Page history
rene2014 created page: Lesson 5
authored
Mar 17, 2015
by
Steffan Lildholdt
Show whitespace changes
Inline
Side-by-side
Lesson-5.markdown
View page @
b5b48850
...
...
@@ -42,6 +42,9 @@ A video of the end result is seen in [XXX]. This video shows that the Lego robot
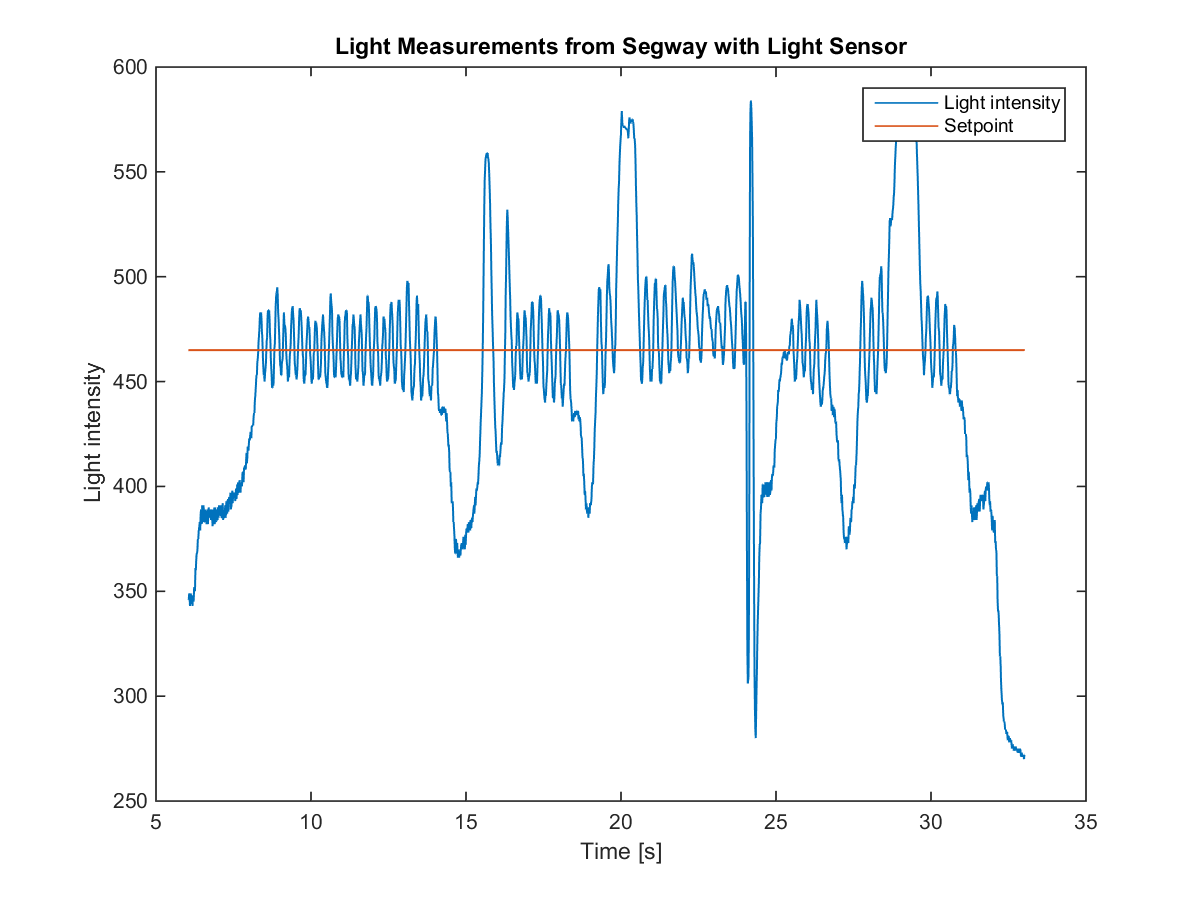
This image shows the PID controllers offset as the red line and the output of the light sensor as the the blue graph.
### Exercise 2, Self-balancing robots with color sensor
...
...
...
...
