@@ -199,7 +199,7 @@ The output of the light sensor is again inspected by using the data logger.
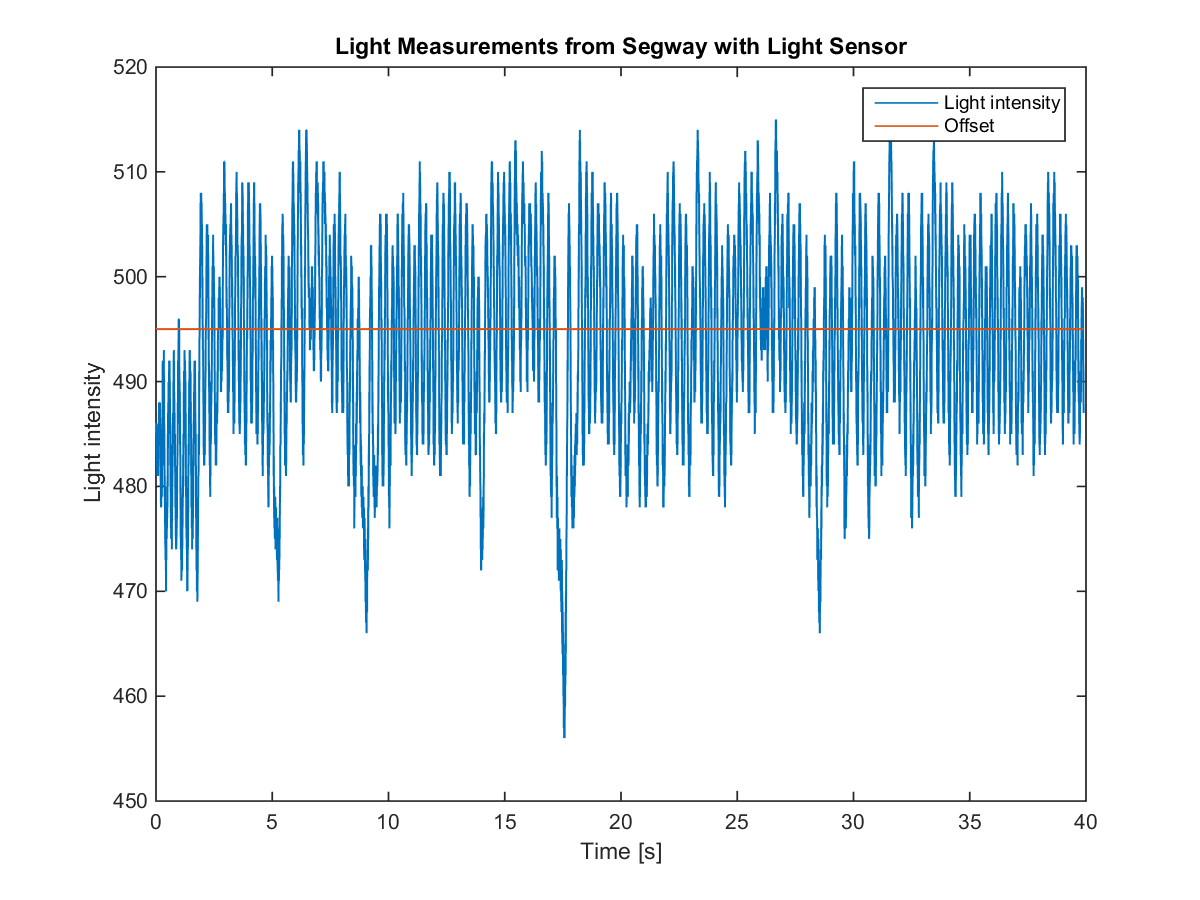
Even though the output of the two sensors are similarly shaped the robot has a higher tendency to fall when using the light sensor. So despite our expections the light sensor performed worse than the color sensor under the same conditions as seen in the video in the references section. The cause for this is at time of writing unknown but the battery powerof the robot might affect the end result.
Even though the output of the two sensors are similarly shaped the robot has a higher tendency to fall when using the light sensor. So despite our expections the light sensor performed worse than the color sensor under the same conditions as seen in the video in the references section. The cause of this is at time of writing unknown but the battery powerof the robot might affect the end result.
