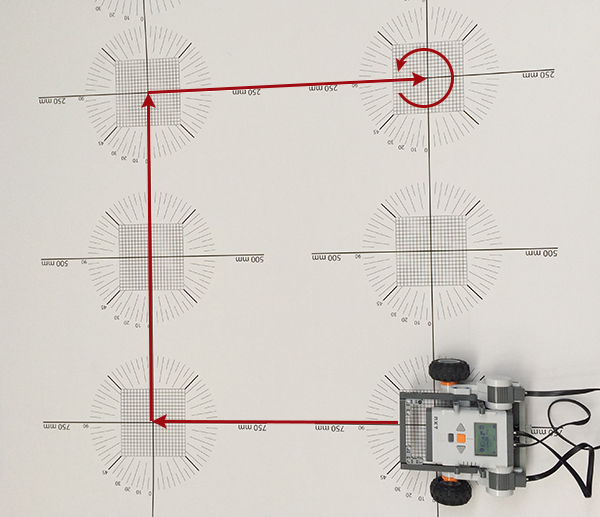
The particle filter was tested by making the car follow the track as shown in the picture below. By using the poster with distances it is possible to see how accurate the car is.
Test setup med billede.